Lineární verze metody podpůrných vektorů – lineárně neseparabilní třídy
Pokud nejsou třídy lineárně separovatelné, nemohou být podmínky představené v předchozí podkapitole splněny pro všechny body současně. Navíc i v některých případech, kdy jsou třídy lineárně separovatelné, by mohlo být výhodnější pár objektů raději klasifikovat chybně a vytvořit robustnější klasifikátor s větším tolerančním pásem, než vytvořit klasifikátor, který sice všechny trénovací objekty klasifikuje správně, ale bude mít velmi úzké toleranční pásmo a na nová data bude fungovat špatně, protože bude přeučený (případem je situace na Obr. 9 v minulé podkapitole).
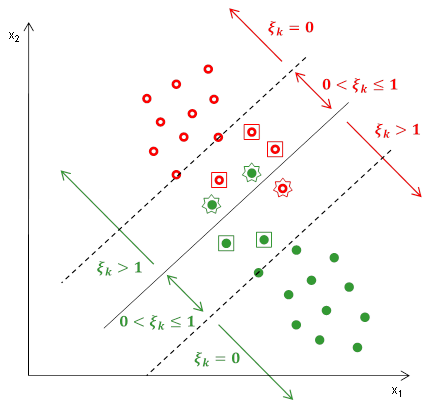
Tyto problémy lze vyřešit tak, že zavedeme relaxační proměnné (slack variables) vyjadřující, jak moc každý bod (objekt) porušuje danou podmínku (Obr. 10), tedy:
- pokud leží objekt vně tolerančního pásma a je správně klasifikován, pak
;
- pokud leží objekt uvnitř tolerančního pásma a je správně klasifikován (na Obr. 10 jsou tyto body ohraničeny čtverečky), pak
;
- pokud leží objekt na opačné straně hranice a je tudíž chybně klasifikován (na Obr. 10 jsou tyto body ohraničeny hvězdičkami), pak
.
Pomocí relaxačních proměnných tak můžeme podmínky elegantně zapsat ve tvaru
|
|
|
|
Ve tvaru (28) by však bylo obtížné kriteriální funkci minimalizovat, proto se používá jiný tvar:
|
|
(29)
|
Tuto úlohu za podmínky (27) lze také řešit pomocí metody Lagrangeova součinitele. Zavedeme vektor Lagrangeových součinitelů , kde
, a pomocí nich vyjádříme optimalizovanou funkci jako:
|
|
za podmínek
|
|
(31)
|
Toto Lagrangeovu funkci zderivujeme podle proměnných a
,
a derivace položíme rovny nule, čímž získáme soustavu (tzv. Karushovy – Kuhnovy – Tuckerovy podmínky):
|
|
(32)
|
|
|
(33)
|
|
|
(34)
|
|
|
(35)
|
|
|
(36)
|
Po zderivování získáme:
|
|
|
|
|
|
|
|
což je opět soustava (nelineárních) rovnic. Řešením této soustavy získáváme optimální hodnoty pro a
.
Obdobně jako u lineárně separabilních tříd můžeme dosadit výrazy (37) a (38) do výrazu (30), čímž dostaneme
|
|
tedy výraz analogický k výrazu (26). U nelineárně separabilních tříd však funkci (40) maximalizujeme za podmínek pro
a
. Této formy zápisu opět využijeme v podkapitole o nelineární verzi metody podpůrných vektorů.
