Autonomní systémy v rovině
V tomto oddílu se budeme zabývat systémem Autonomní systémy a kvalitativní teorie (1) pro tedy systémem
|
|
(5) |
Definice 2.1. Křivka zadaná implicitně rovnicí (resp.
) se nazývá
-nulklina (resp.
-nulklina) rovnice Autonomní systémy a kvalitativní teorie (5).
Průsečík nulklin je stacionární bod, tečna k trajektorii v jejím průsečíku s -nulklinou (resp.
-nulklinou) je rovnoběžná s osou
(resp.
).
Definice 2.2. (typy stacionárních bodů v rovině). Stacionární bod systému Autonomní systémy a kvalitativní teorie (5) se nazývá
|
|
bod rotace, jestliže v jeho libovolném okolí leží cyklus, obsahující |
||
|
|
střed, jestliže existuje jeho ryzí okolí |
||
|
|
ohnisko, jestliže existuje jeho ryzí okolí a pro orientovaný úhel (trajektorie se přibližuje ke stacionárnímu bodu (nebo se od něho vzdaluje) po spirále), |
||
|
|
uzel, jestliže existuje jeho ryzí okolí a pro orientovaný úhel |
||
|
|
sedlo, jestliže existuje jen konečný počet trajektorií |
Stacionární body lineárního homogenního autonomního systému
Lineární homogenní autonomní systém je lineární homogenní systém s konstantní maticí. Budeme se tedy zabývat dvojrozměrným systémem
|
|
(6) |
Označme
Pokud má systém Autonomní systémy a kvalitativní teorie (6) jediný stacionární bod
Vlastní čísla matice
jsou kořeny charakteristické rovnice
|
|
(7) |
tedy při označení je
(i) 
(i.1) 
V tomto případě je a kořeny charakteristické rovnice Autonomní systémy a kvalitativní teorie (7) jsou ryze imaginární,
takže řešení systému Autonomní systémy a kvalitativní teorie (6) s počáteční podmínkou
je
pro vhodné konstanty
přičemž
Jedná se o parametrické vyjádření elips se středem každá trajektorie je tedy cyklem se stacionárním bodem
ve svém vnitřku. To znamená, že stacionární bod
je střed.
(i.2) 
(i.2.a) 
V tomto případě je charakteristická rovnice Autonomní systémy a kvalitativní teorie (7) má dva různé komplexně sdružené kořeny
a systém Autonomní systémy a kvalitativní teorie (6) s počáteční podmínkou
má řešení
kde
jsou vhodné konstanty, přičemž
Jedná se o parametrické vyjádření spirály, která se „navíjí“ na stacionární bod nebo se z něho „odvíjí“.
| Pokud |
pokud |
(i.2.b) 
Nechť je řešením systému Autonomní systémy a kvalitativní teorie (6) a označme
úhel, který svírá přímka procházející body
s vodorovnou osou. Platí
V tomto případě je a
Charakteristická rovnice Autonomní systémy a kvalitativní teorie (6) má dva reálné různé kořeny
takové, že oba mají stejné znaménko jako
Nechť pro určitost
a
je vlastní vektor příslušný k vlastní hodnotě resp.
Alespoň jedna ze souřadnic každého z vlastních vektorů je nenulová. Obecné řešení systému Autonomní systémy a kvalitativní teorie (6) s počáteční podmínkou
je
přitom alespoň jedna z konstant
je nenulová.
Je-li pak
a
|
|
je-li pak
a
|
|
Pokud pak
a pokud pak
Analogicky, pokud pak
Pokud pak
Stacionární bod je v tomto případě uzel. Směrový vektor polotečny k libovolné trajektorii ve stacionárním bodě je vlastním vektorem matice
(i.2.c) 
V tomto případě je neboť
charakteristická rovnice Autonomní systémy a kvalitativní teorie (7) má dvojnásobný kořen
a systém Autonomní systémy a kvalitativní teorie (6) s počáteční podmínkou
má řešení
kde jsou nějaké konstanty, z nichž aspoň dvě jsou nenulové. Proto platí
|
|
Je-li pak
|
|
a tedy
Je-li pak analogicky
Stacionární bod je v tomto případě uzel. Nyní však již obecně neplatí, že směrový vektor polotečny k trajektorii ve stacionárním bodě je vlastním vektorem matice
v případě
(tj. pokud vlastní hodnotě
matice
přísluší dva lineárně nezávislé vlastní vektory) je každá přímka procházející bodem
polotečnou nějaké trajektorie.
Je-li pak z podmínky
tj.
plyne, že
| Vlastní hodnotě |
Je-li pak z podmínky
plyne
tj.
| Matice | má pro |
příslušný k vlastní hodnotě |
| je každý vektor vlastním vektorem matice | příslušným k vlastní hodnotě |
Nyní můžeme předchozí tvrzení upřesnit. Je-li pak směrový vektor polotečny k trajektorii ve stacionárním bodě
je vlastním vektorem matice
příslušným k vlastní hodnotě
Je-li
pak každý nenulový vektor je směrovým vektorem polotečny k nějaké trajektorii ve stacionárním bodě
(ii) 
V tomto případě je což znamená, že rovnice Autonomní systémy a kvalitativní teorie (7) má dva reálné různé kořeny
Poněvadž
mají tyto kořeny opačná znaménka. Nechť pro určitost
Označme
resp.
vlastní vektor matice
příslušný k vlastní hodnotě
resp.
Obecné řešení systému Autonomní systémy a kvalitativní teorie (6) je podle ref{rSLRk}
kde
jsou nějaké konstanty. Pro
je
pro je
a pro je
To znamená, že stacionární bod je sedlo. Směrový vektor polotečny ke trajektorii, která směřuje ke stacionárnímu, resp. od stacionárního, bodu, je vlastním vektorem matice
příslušným k záporné, resp. kladné, vlastní hodnotě.
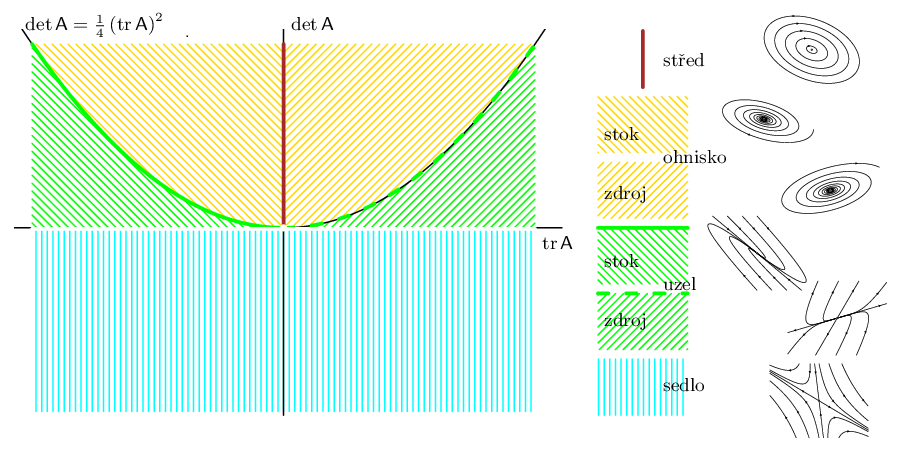
Výsledky provedené analýzy lineárního dvourozměrného systému Autonomní systémy a kvalitativní teorie (6) s konstantní maticí jsou shrnuty graficky na následujícím obrázku.
Obr. 2.1. Typy izolovaných stacionárních bodů dvourozměrného autonomního lineárního homogenního systému Autonomní systémy a kvalitativní teorie (6) v závislosti na hodnotách stopy a determinantu jeho matice.