1 Vnější popis nelineárních systémů
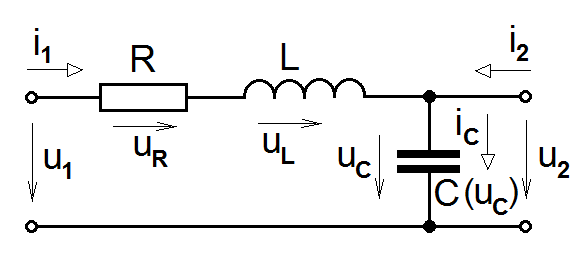
Nyní předpokládejme model cévního segmentu s reálnou modifikací, kdy je roztažnost cévní stěny závislá na tlaku krve v cévě. V základním náhradním elektrickém schématu to znamená jedinou změnu - předpokládáme kapacitu kondenzátoru (objem cévy) závislou na napětí na kondenzátoru (tlaku krve v cévě) (obr. Matematický popis systémů pracujících ve spojitém čase II 1). To znamená, že do systému zavedeme jednu nelinearitu.
 |
|
Obr. 1. Náhradní nelineární elektrické schéma cévního segmentu
|
Odvození diferenciální rovnice uvedené v předchozí výukové jednotce v kap. 2.1 Lineární diferenciální rovnice za této podmínky dospěje beze změny až k rovnici Matematický popis systémů pracujících ve spojitém čase I (8) – uveďme ji zde ještě jednou a označme (8’)
|
|
(8') |
a zde se bohužel vyskytne komplikace při určování proudu obvodem, protože vztah pro okamžité napětí na kondenzátoru se mění na
|
|
(1) |
Z toho plyne
|
|
(2) |
a potom pro platí (pokud poněkud zjednodušíme zápis vynecháním časové závislosti, která ale samozřejmě nepřestává platit)
|
|
(3) |
Protože do vztahu Matematický popis systémů pracujících ve spojitém čase II (8‘) potřebujeme znát jak vztah pro proud (průtok), tak i pro jeho derivaci, potřebujeme výraz v Matematický popis systémů pracujících ve spojitém čase II (3) ještě jednou derivovat. To bychom snad zvládli i obecně, situaci si ale trošku zjednodušme konkrétním předpokladem o lineární závislosti Výpočet to zjednoduší, závěry, kvůli kterým jej provádíme, to neovlivní. Pišme tedy
|
|
(4) |
a pro derivaci
|
|
(5) |
Dosadíme-li oba výrazy do Matematický popis systémů pracujících ve spojitém čase II (8‘), dostaneme
|
|
(6) |
Přepíšeme-li diferenciální rovnici Matematický popis systémů pracujících ve spojitém čase II (6) do očekávaného tvaru, dostaneme
|
|
(7) |
a z toho
|
|
(8) |
kde
|
|
(9) |
Získaná diferenciální rovnice zůstává 2. řádu (počet akumulačních prvků se přece nezměnil), ale zavedení nelineární závislosti kapacity na napětí kondenzátoru způsobilo, že všechny uvedené parametry diferenciální rovnice, tj. i
jsou funkcemi výstupního napětí a diferenciální rovnice je tedy nelineární. Protože určená diferenciální rovnice sama definuje závislost výstupního napětí na vstupním, můžeme konstatovat, že parametry soustavy formálně závisejí i na jejím vstupu. Z toho konečně plyne ponaučení, které lze zobecnit, totiž že vlastnosti nelineární soustavy nezávisejí pouze na struktuře samotné soustavy, nýbrž i na jejím vstupu, což samozřejmě případnou analýzu významně komplikuje.
Nyní zkusme určit obrazovou přenosovou funkci nelineární varianty obvodu s diferenciální rovnicí, která je podle Matematický popis systémů pracujících ve spojitém čase II (7)
nebo v obecném tvaru podle Matematický popis systémů pracujících ve spojitém čase II (8)
Protože jednotlivé členy uvedené diferenciální rovnice jsou dány součiny funkce a derivace určité proměnné, lze její Laplacovu transformaci počítat (pokud vůbec) pouze pro daný konkrétní případ a nelze obecně stanovit tvar operátorové funkce nelineárního systému.
Tedy shrňme, nelineární soustavu lze popsat nelineární diferenciální rovnicí, obrazovou přenosovou funkci obecně sestavit nejde, a tudíž nemá smysl se zabývat ostatními způsoby popisu používanými pro popis lineárních soustav. Nelze se tedy zabývat ani frekvenčními vlastnostmi nelineárních soustav.
